
Sealog
Sealog is a flexible logging and monitoring system to read, display and log data from underwater sensors fitted to a ROV, Trencher, Plough or other similar device.

Interfacing
Data input from Multiple RS232 ports.
User configuration of baudrate, data bits, stop bits and parity.
All data time tagged
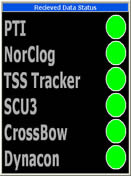
Each channel of RS232 data can be monitored via alpha display.
Also boxes relating to data turn read if data is lost
Display
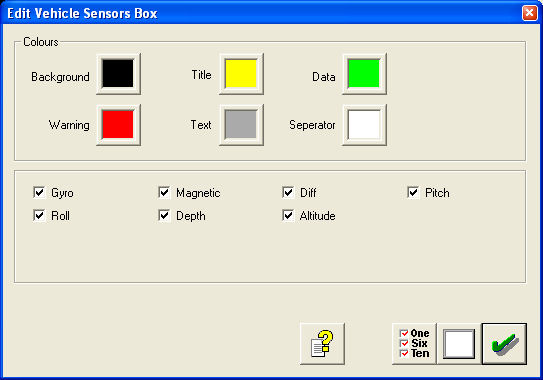
The colours in all displays can be configured by the users. In each alphanumeric display the user can select which

 items to display. In dynamic mode the user can position and resize each box, the size of the lettering changes to fill
items to display. In dynamic mode the user can position and resize each box, the size of the lettering changes to fill
the required space. The caption bar at the top of each box can be turned off locking the box in position.
All settings can be stored.
- Data can be display as text
- The data can be displayed graphically

- User defined graphs can be set up to monitor sensor data either against time or KP.
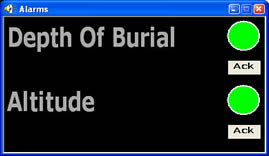
- The system can be set up to provide visual and audible alarms on individual parameters.
 User Definable Displays
User Definable Displays
For all data it can be monitored in their own user definable alphanumeric display, where appropiate
data can also be defined graphically. The display can either be pre configured or the system can be
supplied where the user can select select, positionand resize all displays.
- The displays can be configured by the user
Positional Data

 The position of the veseel can be positioned using surface navigation system. Therefore all sensor data
The position of the veseel can be positioned using surface navigation system. Therefore all sensor data
can be related to an absolute position. The system can used as a stand alone system or inconjunction
with a navigation system.
- Position data can be logged from a GPS unit outputing NMEA0183 data.
- Position data can be logged by using a propriatery data string.
an ultra short baseline system.
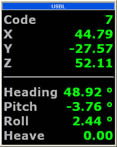 The position of the ROV, plough, trencher can be position in relation to the surface navigation.
The position of the ROV, plough, trencher can be position in relation to the surface navigation.
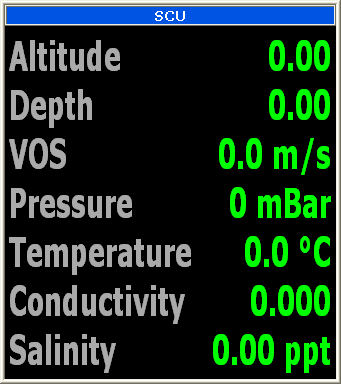
Vehicle Sensors
The sensor on the vehicle can monitor monitored and displayed.
- Heading pitch and roll can be monitored. If there is a gyro and magnetic
compass the relationship
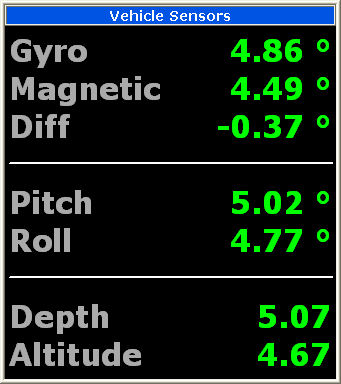
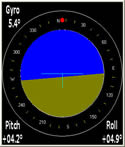
between these two heading sensors can also be monitored. - The heading sensors can be monitored graphically. The style of the
pointer is user selectable. - Heading, pitch and roll can be monitored as a single graphical display.
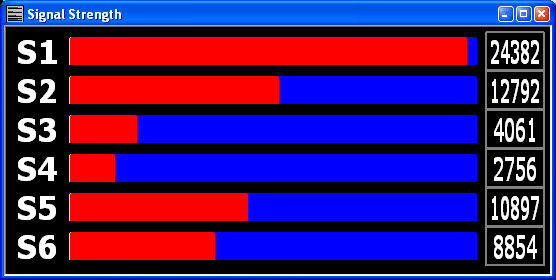
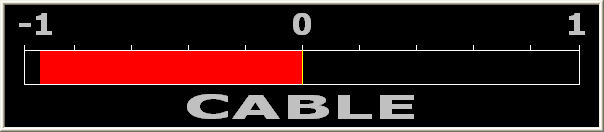
Cable / Pipe Tracker
 The position of the cable or pipeline can be position by using a tracking system.
The position of the cable or pipeline can be position by using a tracking system.
- The data can be displayed in an alpha numeric box.
- Signal strengh data can be displayed graphically to assist in quality control monitoring.
- A left right indicator can help to position the vehicle in relation to the pipe or cable.
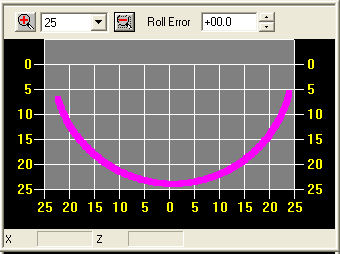
Scanning Profiler
The seabed can be monitored by using a scanning profiler.
- Data from the scanning profiler can be displayed graphically.
The scale is user definable. - Other sensors related to the scanning profiller can be monitored.
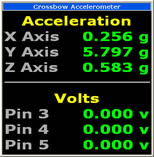


Other Sensor Data
The system can be set up to monitor data from other sensors.
- Some additional devices have already been added to the logging software.
- All additional data can be displayed, monitored and logged.
- For specialist pieces of equipment Norcom can quickly add this to the system.
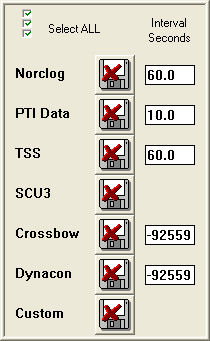


Flexible Logging
The user can log raw data as well as establishing user defined logs.
- User defined logs can be set up. The user can define the exact format of
the logging string and the interval it is logged. - The data can be logged to a hard drive or output to and RS232 port.
- The user can select any variable to log. Additional text information can be added to the string.
- The string can be set up to log to a CSV file for import into a spreadsheet.
 Alternatively the system can log directly to an excell file.
Alternatively the system can log directly to an excell file.- The user can control logging of individual raw data files.
- The user can also monitor the amount of hard disc space available for logging.
 You can keep up to date on all the latest special offers, events and more via any of the following networking sites.
You can keep up to date on all the latest special offers, events and more via any of the following networking sites.